Sample Datasets
These article points to datasets that can be used with maplab and ROVIOLI.
CLA dataset (from the paper)
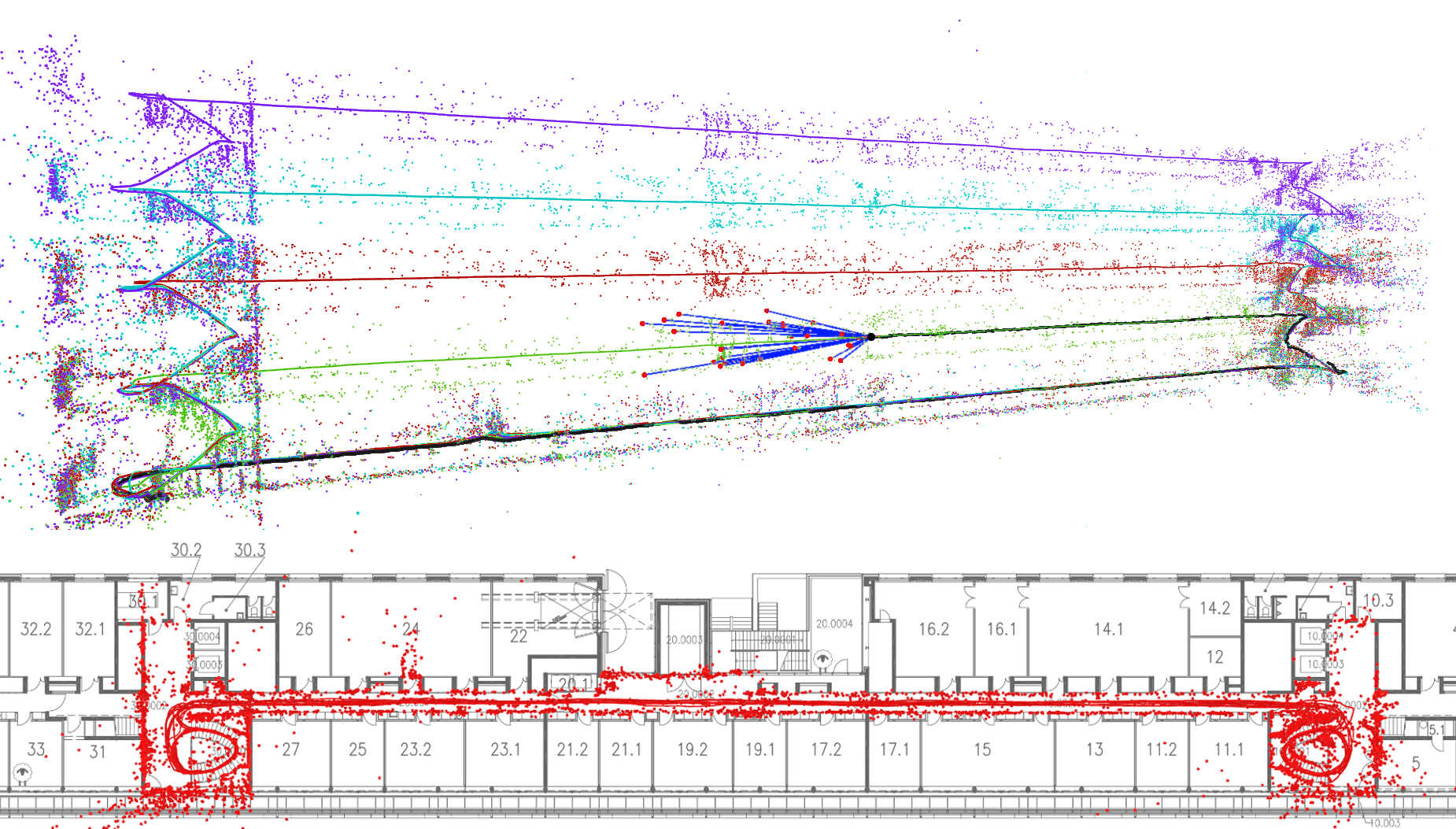
| Description | Rosbag | VI map |
|---|---|---|
| Calibration data for CLA rosbags | Link | - |
| CLA floor F for map building | Link | Link |
| CLA floor G for map building | Link | Link |
| CLA floor H for map building | Link | Link |
| CLA floor J for map building | Link | Link |
| CLA floor F for localization | Link | - |
| Merged and optimized VI map of CLA floors F, G, H and J | - | coming soon |
Zurich old town dataset (from the paper)

| Description | Type | Link |
|---|---|---|
| Optimized map | VI map | Link |
EuRoC MAV datasets (from the paper)

| Description | Rosbag | VI map (unoptimized) | VI map for reconstruction (with images) |
|---|---|---|---|
| MH01 | Link | Link | Link |
| MH02 | Link | Link | Link |
| MH03 | Link | Link | Link |
Rosbags for the other EuRoC datasets can be downloaded from here.