里程计教程
运行里程计:配置文件、ROS话题、包/话题模式、可视化
在本教程中,使用我们的里程计进行定位,并且可视化。 我们的里程计有两种运行模式:
必要条件
运行里程计需要以下校准文件:
- 相机校准和IMU参数,
- finder localication 配置文件
estimator_config.yaml
此外,需要提供包含数据集的包文件(参见[数据集与实验])或者现场数据源。
通过rosbag运行
对于这个教程,我们将从Euroc数据集中运行里程计。 请访问Euroc数据集网站,并下载Machine Hall 01的bag文件。
修改rovioli.launch中的datasource_type为rosbag,指定datasource_rosbag的正确路径。 现在,启动一个roslaunch运行数据集:
source ~/maplab_ws/devel/setup.bash
roslaunch rovioli rovioli.launch
注意:
# 使用此标志来移除(或更改)相机话题的后缀(默认为:image_raw)。
vio_camera_topic_suffix=""
通过rostopic运行
对于这个教程,我们将从Euroc数据集中运行里程计。 请访问Euroc数据集网站,并下载Machine Hall 01的bag文件。
修改rovioli.launch中的datasource_type为rostopic。 现在,使用Euroc数据集作为实时源,调用:
source ~/maplab_ws/devel/setup.bash
roslaunch rovioli rovioli.launch
然后,在单独的终端中启动数据源:
rosbag play MH_01_easy.bag # or start your sensor node.
注意:
# 使用此标志来移除(或更改)相机话题的后缀(默认为:image_raw)。
vio_camera_topic_suffix=""
输出
默认情况下,姿势估计值会发布在以下列表中:
/maplab_rovio/T_G_I/maplab_rovio/T_G_M在没有定位时为单位矩阵。/maplab_rovio/T_M_I/maplab_rovio/bias_acc/maplab_rovio/bias_gyro/maplab_rovio/velocity_I
可视化
使用这个RViz配置用于可视化最重要的里程计主题。
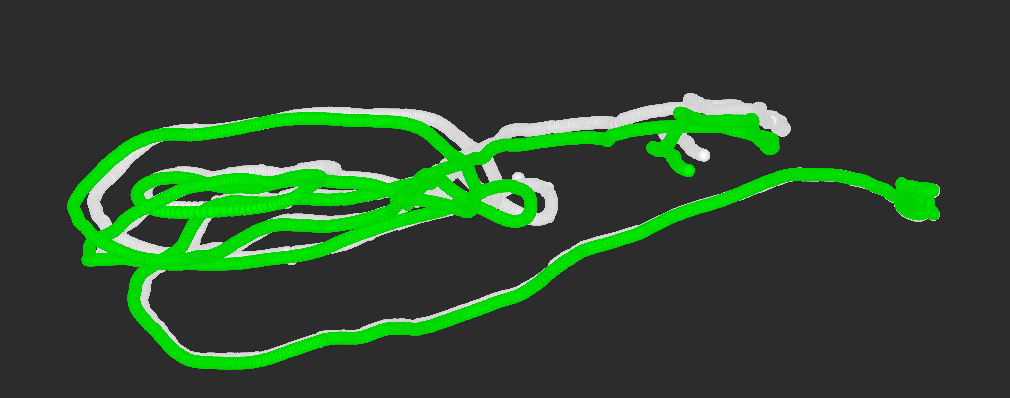
这些标记可视化了每一帧的姿态估计(里程计= T_M_I,定位= T_G_I)。
启用/禁用"使用以下标志:
publish_debug_markers
话题:
/debug_T_G_I
/debug_T_M_I